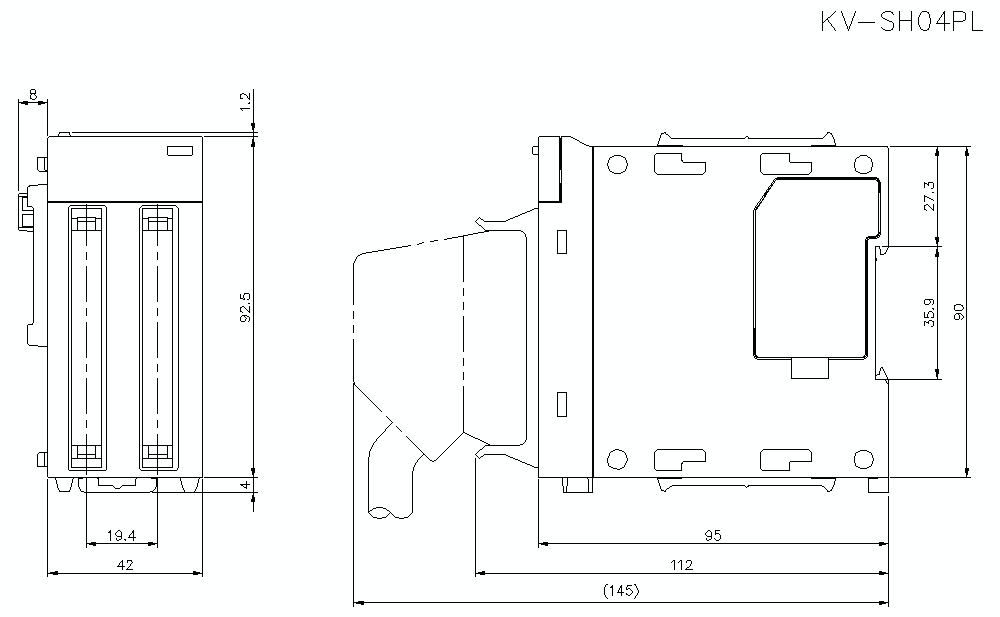
型号 | KV-SH04PL*1 | |||
类型 | 高速定位单元 | |||
控制轴数 | 4 轴 | |||
输入 | 正 (负) 方向限位开关/原点传感器/停止传感器/连续即时启动、各轴 1 点共 4 点、可输入 24 VDC | |||
输出 | 脉冲输出 (差分线驱动器时):相当于 AM26C31 (最大 20 mA) | |||
输出频率 | 1 Hz 至 8 MHz | |||
输出格式 | 差分线驱动器/集电极开路 (使用硬件开关切换各轴) | |||
控制模式 | 标准模式、高速模式 | |||
控制周期 | 标准模式:500 µs、高速模式:62.5 µs | |||
启动时间 | 标准模式:500 µs 以上、高速模式:8 µs 以上 (连续即时启动: 1 µs) | |||
基本动作 | 标准模式:原点复归/JOG、直线插补 (2 至 4 轴)、位置控制 (ABS/INC)、速度控制 (正/负) | |||
功能 | 标准模式: | |||
位置单位 | 标准模式:mm、deg (角度)、PLS (脉冲数)、小数点位置 0 至 9 位、单位转换功能 | |||
定位控制 | 位置设定范围 | -2,147,483,648 至 2,147,483,647 | ||
加减速曲线 | 标准模式:直线/SIN、高速模式:直线 | |||
加减速度 | 加速/减速、单独设定 | |||
加减速时间 | 标准模式:0 至 65,535 ms | |||
M 代码 | 0 至 65,000、WITH/AFTER 模式 | |||
点数 | 100 点/轴 | |||
原点复位 | 原点复位方式 | DOG 式 (有 Z 相/无 Z 相/接触)、DOG 式寸动 (有 Z 相/无 Z 相)*2、 | ||
JOG/寸动 | 寸动 (可指定脉冲数)*2、JOG | |||
示教 | 当前坐标示教 | |||
24 V 电源输入 (I/O) | 24 VDC (-15 %/+20 %) | |||
5 V 电源输出 | 5 VDC (±10 %)、200 mA 以下 | |||
其他功能 | 单元中断、单元间同步产生的多轴同时启动 | |||
内部消耗电流 | 200 mA 以下、外部 I/O :260 mA 以下 | |||
重量 | 约 230 g | |||
*1 KV-8000/KV-7000 系列专用 | ||||
* 如果字符难以读取,请确认CAD或手册。
kv-sh04pl_dimension_01.gif