Support for Coppelia Robotics virtual robot experimentation platform (V-REP)
Full system modeling capability
Visualization and selection of coordinate systems for multi-DOF systems like hexapods
Pre-configured models connect directly to Aerotech's A3200 motion controller
Import custom objects as 3D mesh files
Supports collision detection between all elements in the environment
Control grippers and vacuum pickup devices with Aerotech I/O
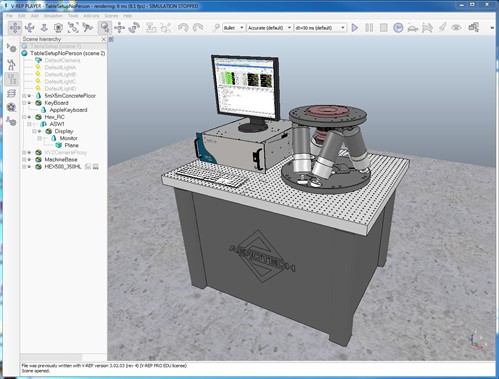
Coppelia Robotics V-REP is an open platform for simulating automation processes. Robotic actuators, linear/rotary stages, and tooling are easily assembled in a 3D environment. Functions such as vision, gripping, and vacuum pickup are also supported. The complete automation process can be simulated during the design phase to minimize risk and reduce startup and integration times.
Coppelia Robotics V-REP is an open platform for simulating automation processes.
Creating a simulation is as easy as selecting an Aerotech product from the “Models” menu, mapping an Aerotech controller axis to the model, and clicking the start button. The model position will continually track the Aerotech controller axis position while the simulation is active.
System modeling is not limited to Aerotech provided components. Custom actuators can be assembled from linear and prismatic motor primitives. Conveyors, SCARA robots, and 6-axis robots are included in the standard V-REP installation. Motors in V-REP supplied models can be controlled from within V-REP or linked to axes on the Aerotech controller.
All objects in the environment can be checked for interference. Evaluation of interference can occur between moving and stationary objects – for example, the platform of a hexapod and a stationary fixture, or between moving objects, or a fixture attached to the hexapod platform and the hexapod struts (see image below). Visual indication of interference is user configurable. Collision events can be detected in the V-REP scripting environment with status sent to the Aerotech controller to halt program operation.
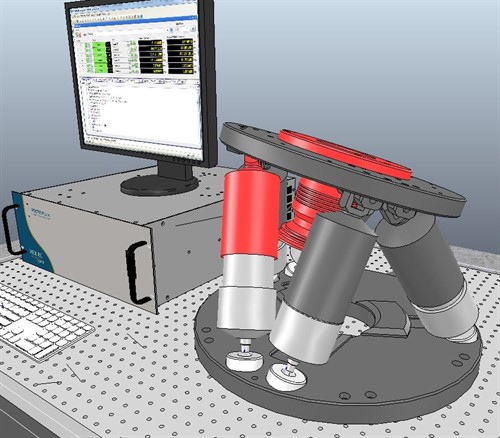
Evaluation of interference can occur between a fixture attached to the hexapod platform and the hexapod struts.
Tool coordinate reference frames are used to visualize the location and orientation of a tool in 3D space. Frames can be added in the V-REP application when creating the simulation scene or through the A3200 controller at program run-time. Adding coordinate systems through the A3200 at run-time ensures that tool locations in the simulation environment are identical to the locations used to calculate tool path motion in the controller.
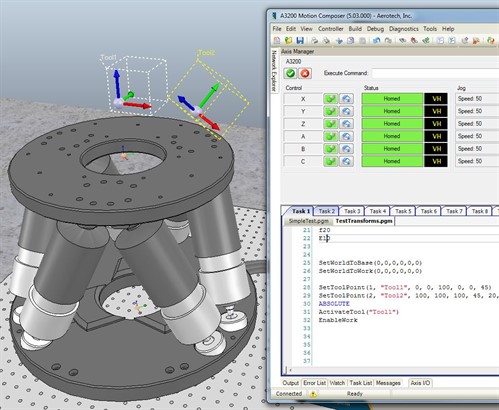
Add tool-point frames in V-REP directly from A3200 programs for a hexapod.
Contact your local Aerotech Sales Representative for additional information on installation and configuration of the Simulation API.