 Enlarge Image
Enlarge ImageOptimizes your part profile
Increase throughput
Eliminate tracking error
ILC is an advanced feature which examines the following error from previous trajectory runs and then calculates an optimal commanded trajectory such that the desired part geometry is achieved. After you run the trajectory a number of times, the iterative algorithm optimizes the position tracking. Each time that you run the trajectory with learning control enabled, ILC collects and uses the information to optimize the trajectory to achieve near-zero following error.
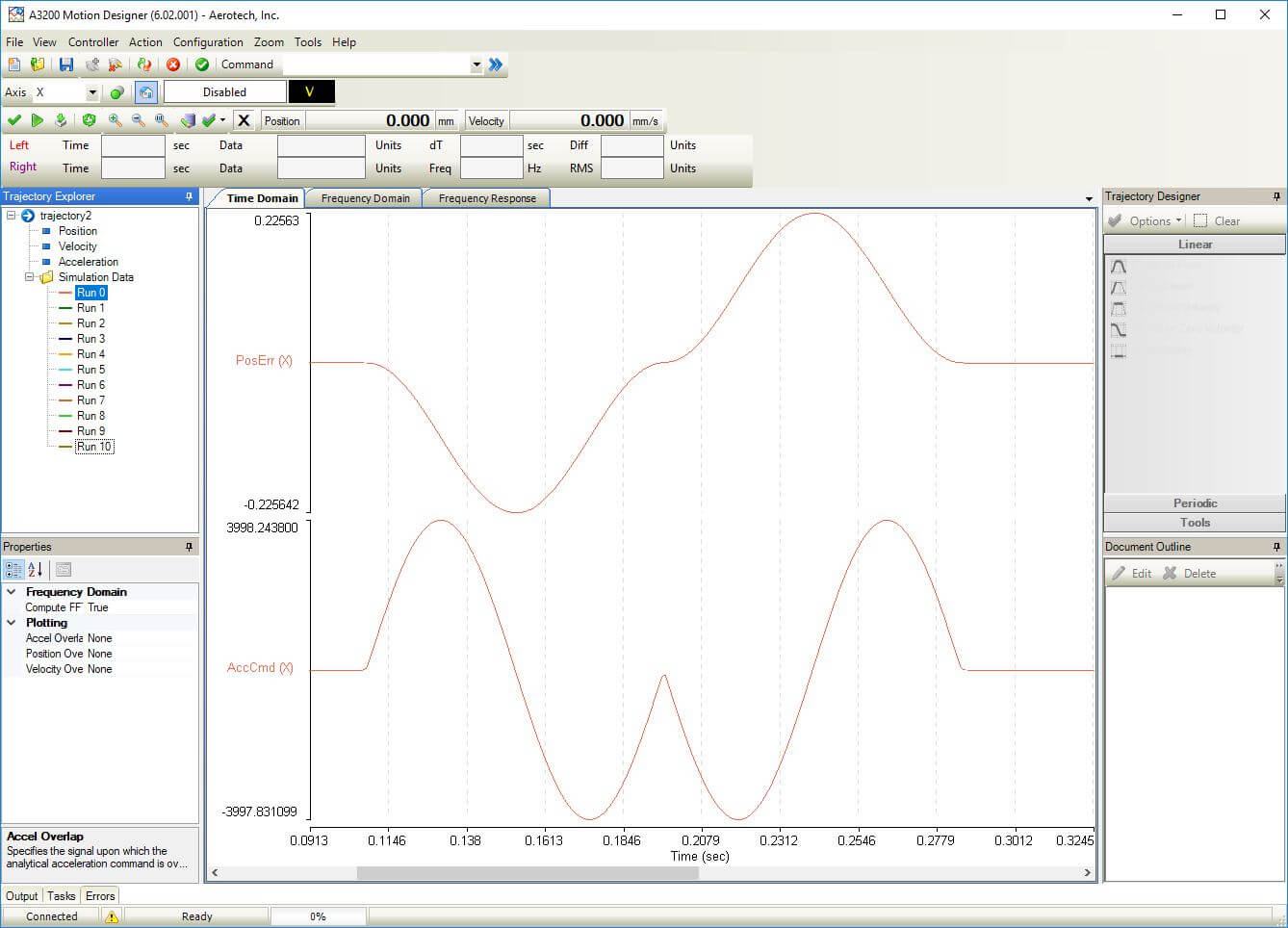
A typical ILC optimization starts out with significant Position Error (PosErr) and a smooth Acceleration Command (AccCmd) profile.
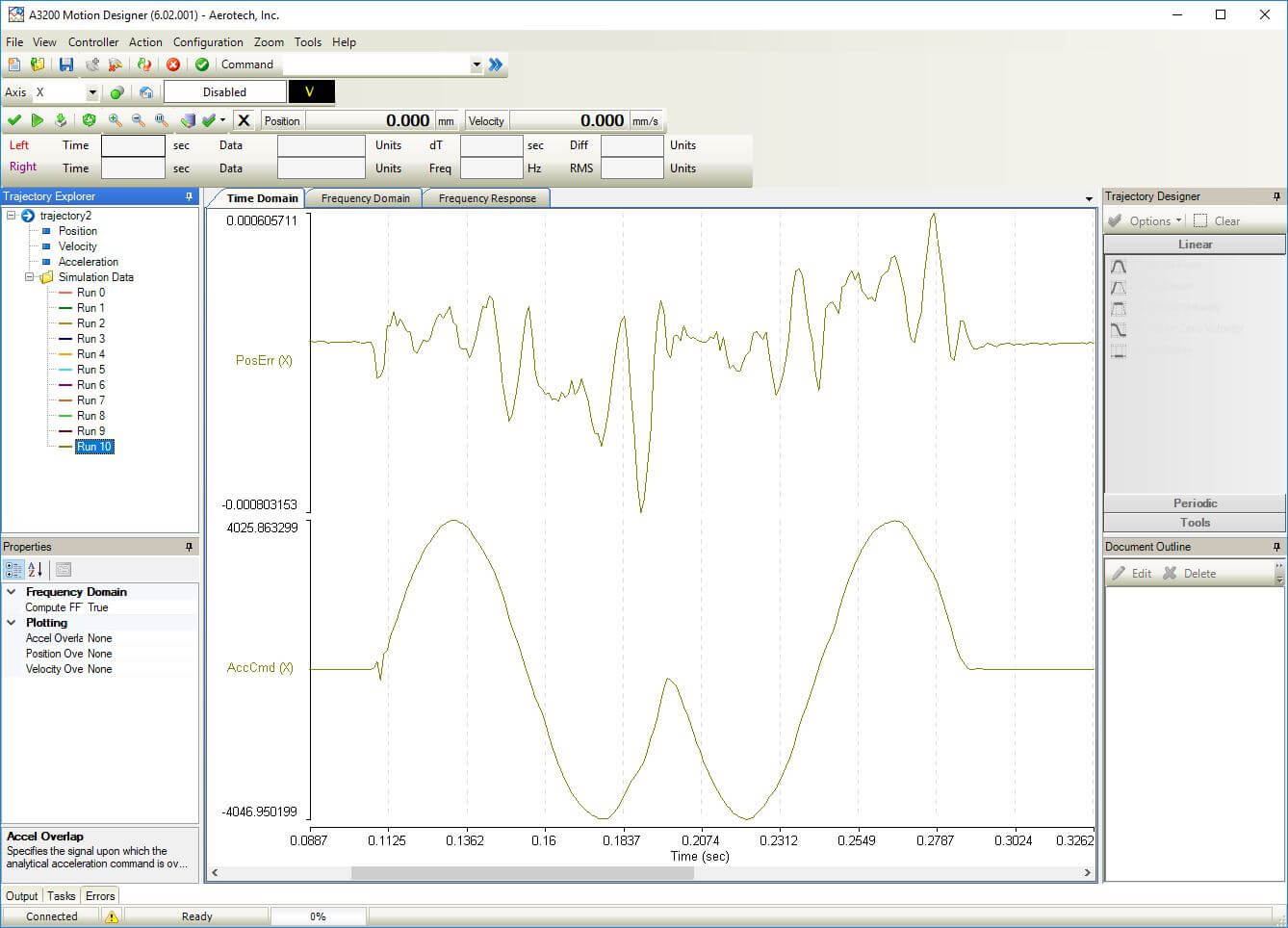
After 10 learning runs, the Position Error is nearly eliminated and you can see a change in the Acceleration Command. This updated motion trajectory minimizes the following error.
Iterative Learning Control is a feature in Aerotech's Motion Designer software package.

{kind=link}
{kind=link}