参数 | 最小值 | 典型值 | 最大值 | 单位 |
输入 | ||||
电压 | 12 | - | 48 | Vdc |
电流 | - | - | 22 | A |
输出 | ||||
功率 | - | - | 1000 | mA |
恒流输出电压1) | 2 | - | 40 | V |
电流范围 | 0.0 | - | 25.0 | A |
电流纹波幅度 | - | 40 | 60 | mA |
电流纹波频率 | - | 425 | - | kHz |
电流设置精度 | - | - | 1.5 | % |
过电流值2) | 5 | 26 | 30 | A |
软件启动上升时间3) | - | - | 11 | ms |
软件启动下降时间3) | - | - | 16 | ms |
上升/下降时间4) | - | 50 | 70 | µs |
电流设定监控 | - | 50 | - | mV/A |
调制 | ||||
触发输入电压 | 3.3 | - | 5 | V |
触发输入阻抗 | - | 500 | - | Ω |
触发脉冲频率 | - | - | 3 | kHz |
触发脉冲宽度 | 150 | - | - | µs |
触发电流延时 | - | - | 20 | µs |
模拟输入电压 | 0 | - | 10 | V |
模拟输入阻抗 | - | 4 | - | kΩ |
电流设定值 | - | 2.5 | - | A/V |
模拟输入频率5) | - | - | 30 | kHz |
功耗 | ||||
效率6) | - | - | 97 | % |
最大功耗 | - | - | 42 | W |
温度 | ||||
工作温度 | +10 | - | +40 | ℃ |
存储纯度 | -20 | - | +70 | ℃ |
湿度,不结露 | - | - | 95 | % |
连接 | ||||
功率 | 2-pin接线端子(393900102 Molex) | |||
CAN接口 | 8-pin带状线缆连接器(7-188275-8泰科电子) | |||
连锁 | ||||
触发 | ||||
调制 | ||||
电流监控 | SMA (5-1814832-2 Molex) | |||
尺寸 | ||||
尺寸 | 70×56×34 mm | |||
重量 | ≤200 g | |||
1)输出电压不能大于0.85*Vin.
2)默认值为26A.可以编程设置为5 A到30A.
过流会导致驱动器立即停止并且带有撬棍保护。
3)对于模式1.
4)对于模式2, 3.取决于驱动器到激光器的线缆长度。
5)详见图5.
6)取决于输入电压、输出电压、输出电流。详见图6.
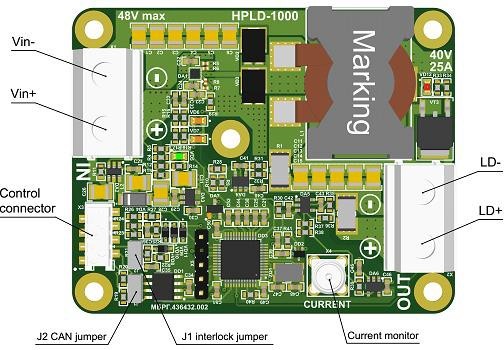
引脚功能
引脚 | 描述 | ||
Vin+ | 连接电源的正极和负极。请注意极性。 使用规格为AWG#13或2.5mm2的线缆,长度不超过1米。 | ||
Vin- | |||
LD+ | 连接到激光二极管的正极和负极,请注意极性。使用规格为 AWG#13或者2.5mm2的线缆。模式1的线缆长度不超过2米,模式2和模式3的线缆长度不超过200mm。 | ||
LD- | |||
控制接口 | 1 | CANH | 连接到CAN接口,注意极性。 使用板上的跳线J1将一个驱动连接到CAN设备上。 如果连接了多个驱动到CAN设备,请删除除了最后一个驱动以外的所有板上的跳线J1。 |
2 | CANL | ||
3 | Interlock+ | 连接到外部连锁电路。 开:锁定,低电平:可操作。 通过1 kΩ的电阻将内部电压提升到3.3V。使用集电极开路或干接点。注意极性。 使用板上的跳线J2来模拟连锁功能。删除板上的跳线J2以启用连锁功能。 | |
4 | Interlock- | ||
5 | Trigger+ | 连接到用于模式2、3的外部脉冲信号发生器。注意极性。 | |
6 | Trigger- | ||
7 | Modulation+ | 连接到用于模式3的外部模拟电压或外部正弦信号发生器。注意极性。 | |
8 | Modulation- | ||
电流监控 | 连接到50Ω的示波器输入中以进行电流监测,50mV对应1A。使用SMA连接器。 | ||